|
I am a Senior Machine Learning Engineer at PAVE, where I work on computer vision for automated vehicle inspections. 🧠 Previously, I worked on computer vision for sports tech and retail at Décathlon and taught machine learning at Ericsson. I got a MASc and Ph.D from Concordia University advised by Abdessamad Ben Hamza. 👀 In my free time, I to like read books, cook fancy meals, lift heavy weights and spend time in nature. 🌿 |

|
|
I am a researcher and engineer, specializing in machine learning and deep learning, with over five years of experience in both academia and industry. 🔬 My goal is to build and democratize access to AI systems that learn with less data, compute and better understand the world around us. I am working to identify and overcome challenges in deploying AI tools, and am driven by their real-world potential, from automated and autonomous systems, to assistive technologies, to healthcare. 🤖 I have created algorithms addressing complex real-world challenges, such as robustness, efficiency, data imbalance and learning from limited supervision. I have several lead-author publications at top venues like WACV, BMVC, ICIP and IEEE TMI, and received awards like the MITACS Accelerate Fellowship. 🏭 Besides, I contribute to open-source software, some in top deep learning libraries like TensorFlow, Kornia & YOLOv6, have been runners up in ML competitions like ImageCLEF Medical (2nd) and AICITY at CVPR (3rd), and mentor AI practitioners. I constantly learn to stay current in the field, and share them through articles and videos to help others grow. 🧑🏫 I try to practice Slow Science. |
|
See also my Google Scholar profile for the most recent publications as well as the most-cited papers. |

|
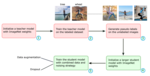
Presents an efficient learning paradigm to address challenges in semantic segmentation, object recognition, and unsupervised object localization, while reducing computational complexity. |

|
A segmentation model with zero-shot generalization to unfamiliar images and objects that are small, reflective or under poor illumination without the need for additional training. |

|
A dataset with 20K high-resolution images and 130K bounding box annotations. Benchmark object detectors and explore large vision language models (LVLMs) as image annotators. |

|
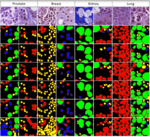
Using masking to focus on context from neighbouring regions around objects and learn a distribution of association across classes, to better recognize occluded and small objects. |

|
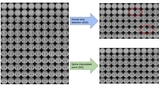
Data filtering algorithm based on cosine similarity to remove similar and redundant synthetic images from the minority class that resemble similarity to images from the majority class. |

|
A single-stage method that captures the contextual relationships between pixels via masking, shows good segmentation performance, especially in ambiguous regions and minority classes. |

|
A self-supervised generative adversarial network based framework for virtual try-on to handle complex person poses while retaining the texture and embroidery of clothing items. |

|
We benchmark several methods designed to tackle class imbalance and find that loss-based methods outperform GAN-based and input-based methods for leukemia detection. |

|
A segmenter (U-Net) followed by a Vision Transformer (ViT) classifier for recognizing product items from videos. Our method achieved 3rd place in the AI City Challenge, Track 4. |

|
A knowledge distillation appraoch for melanoma detection to reduce model complexitiy and enable easy deployment in edge devices. |
|
|
Introduces various efficient deep learning architectures and generative modeling methods to address the scarcity of labels as well as class imbalance in biomedical image analysis. |

|
We propose to fuse encoder and decoder features in U-Nets using a sharpening kernel filter leading to improved performance on various medical image segmentation tasks. |
|
An efficient and robust semi-supervised learning method for image classification. It requires 6x less compute time and 5x less memory compared to prior arts. |

|
Pretraining on videos for human activity recognition leads to better learning for tuberculosis type classification. This method was 2nd place in the ImageCLEF 2021 Medical. |
|
This paper summarizes and publicly releases the challenge dataset, and compile key findings of the methods developed by various participants. |
|
Generate synthetic image data by class conditioning and adversarial training to use as additional training data for imbalanced image classification. |

|
A blood cell segmentation dataset consisting of multiple cell types and benchmark of both learning and non-learning based methods. |

|
Transform a high variation malaria localization dataset to classification and benchmark several classification algorithm for malaria identification from microscopic images of red blood cells. |
|
Analyzing 3D medical images in a per slice basis is a sub-optimal approach, that can be improved by 3D context. The method was ranked 5th in ImageCLEF Medical 2019. |
|
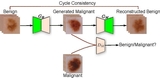
Improving fairness of medical classifiers and reduce data imbalance by enriching training datasets by generating synthetic under-represented class samples from over-represented ones. |

|
SincNet models consistently outperform prior models and generalizes well on unseen and diverse tasks such as Bengali speaker recognition. |

|
Benchmark several classification algorithms for malaria detection from microscopic images of red blood cells. |

|
A 3D CNN with a slice selection method to predict tuberculosis (TB) from chest CT images. Our method achieved 10-th place in the ImageCLEF 2019 Medical. |

|
A deep transfer learning approach that freezes intermediate layers for better accuracy on the NumtaDB Bengali handwritten digit dataset. |

|
Implementation of an automated multifunctional attendance system which uses rfid, fingerprint, and real time facial recognition. |

|
A wireless sensor network with a real time web application for monitoring multiple ships to prevent catastrophic events due to overloading. |

|
A low-cost autonomous mobile security robot based on a multisensor system for the purpose of sending alarms remotely. |
|
Product Counting and Recognition for Retail Checkout, AI City Challenge, CVPR Workshop, 2022 (3rd Place) Tuberculosis Type Classification from 3D CT Scans, ImageCLEF, 2021 (2nd Place) Nuclei Segmentation and Classification from Whole Slide Images, MoNuSAC, 2020 (11th Place) Tuberculosis Prediction, ImageCLEF, 2019 (5th Place) Bengali Handwritten Digit Recognition, Bengali.AI, 2019 (6th Place) |
|
These include datasets I've created. |

|
A dataset with 20K high-resolution images and 130K bounding box annotations. Benchmark object detectors and explore large vision language models (LVLMs) as image annotators. |
|
|
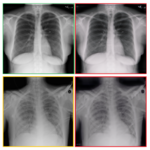
Collection of 21,295 synthetic COVID-19 chest X-ray images. The primary use of this dataset is to be used as additional data for training machine learning models. |
|
These include coursework, side projects and unpublished research work. |

|
A multimodal OCR using LLM fine-tuning to extract ingredients list and query-based retrieval in a RAG-like approach to identify and retrieve explanations of harmful ingredients. |

|
A dataset and a Llama 3-based vision-language model (VLM) fine-tuned using LoRA, enabling multimodal, multilingual and multi-turn conversations about fitness workouts images. |

|
A pipeline for monocular to 3D virtual try-on to synthesize correct clothing parts, preserve logo of clothing and reduce artifacts to finally output better textured 3D try-on meshes. |
|
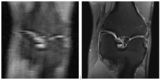
Hasib Zunair, Aimon Rahman fastMRI Image Reconstruction Challenge, 2019 We use deep encoder-decoder architectures to reconstruct a high resolution knee MRI image given a low resolution MRI image. |
|
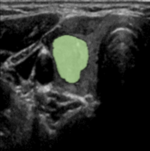
Hasib Zunair, Tajwar Abrar Aleef, Aimon Rahman and Labib Chowdhury MICCAI TN-SCUI Challenge, 2020 Benchmark several semantic segmentation methods for thyroid nodule segmentation task inlcuding supervised learning, transfer learning, and generative adversarial learning. |
|
Machine Learning Research Paper Writing Tutorial , 2024Leveraging Vector Databases with Embeddings for Fast Image Search and Retrieval , 2024Building and Applying Generative Models using PyTorch, Ericsson Canada , 2024Build and Deploy Custom Docker Images for Object Recognition, Towards AI , 2023Deep Learning in Computer Vision with PyTorch , 2023Intro to Deep Learning with NumPy, NSU , 2022Building ML models with TensorFlow, Ericsson Canada , 2021How to get started with building Computer Vision systems, NSU , 20213D image classification from CT scans, Keras, TensorFlow , 2020Programming with Python, NSU , 2019Intro to Deep Learning for Image Classification using Python, NSU , 2019Basics of Image Processing and Computer Vision, NSU , 2018Intro to Robotics (ROBO101), a semester-long series of workshops, NSU, 2018 |